0731-84284278




Accexp無人機(jī)飛行仿真技術(shù)解決方案

2017-04-25
如今無人機(jī)工況條件日趨復(fù)雜惡劣,任務(wù)要求精度很高,同時(shí)需要保證無人機(jī)較高的可靠性。所以無人機(jī)系統(tǒng)復(fù)雜性與日俱增,開發(fā)難度極大,開發(fā)周期漫長,同時(shí)也阻礙了相應(yīng)控制系統(tǒng)的迭代更新。 Accexp在無人機(jī)飛行領(lǐng)域涉及無人機(jī)仿真系統(tǒng)建模、無人機(jī)系統(tǒng)半實(shí)物仿真等相關(guān)領(lǐng)域的研究,并承接過大量關(guān)于無人機(jī)飛行仿真技術(shù)的項(xiàng)目,擁有豐富的無人機(jī)飛行仿真建模與調(diào)試經(jīng)驗(yàn)。
Accexp在無人機(jī)飛行仿真領(lǐng)域能夠提供多種服務(wù),包括:
Accexp在無人機(jī)飛行仿真領(lǐng)域能夠提供多種服務(wù),包括:
• 提供全方位評價(jià)飛機(jī)系統(tǒng)品質(zhì)的仿真平臺;
• 提供全數(shù)字通用無人機(jī)飛行仿真系統(tǒng)模型;
• 提供導(dǎo)航系統(tǒng)、飛行控制系統(tǒng)、發(fā)動機(jī)控制系統(tǒng)等無人機(jī)各分系統(tǒng)的模型仿真;
• 在無人機(jī)總體方案論證階段,通過替換或修改無人機(jī)的氣動數(shù)據(jù)、總體數(shù)據(jù),利用飛行仿真系統(tǒng)給出的仿真結(jié)果進(jìn)行定性定量分析;
• 在無人機(jī)設(shè)計(jì)驗(yàn)證階段,利用無人機(jī)飛行仿真系統(tǒng)提供的模型數(shù)據(jù)和設(shè)備接口,與無人機(jī)系統(tǒng)的真實(shí)部件進(jìn)行連接,開展各種飛行仿真試驗(yàn)。
解決方案
無人機(jī)仿真模型采用MATLAB/Simulink實(shí)現(xiàn),其中無人機(jī)的飛行動力學(xué)模型、控制模型、導(dǎo)航模型等通過Simulink搭建實(shí)現(xiàn),仿真模型的參數(shù)設(shè)置通過MATLAB開發(fā)實(shí)現(xiàn)。系統(tǒng)的組成如下圖所示:
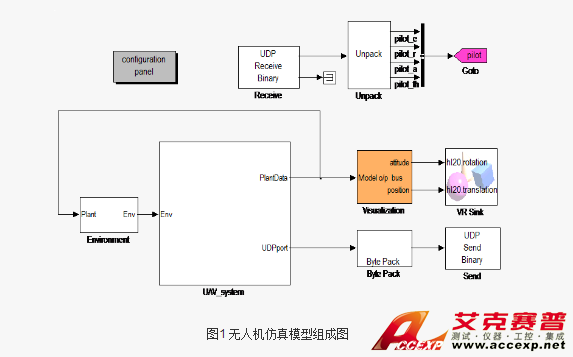
仿真所使用的無人機(jī)飛行仿真系統(tǒng)模型結(jié)構(gòu)如1所示,圖中仿真系統(tǒng)主要由環(huán)境模塊、無人機(jī)系統(tǒng)模塊、參數(shù)設(shè)置模塊、操縱桿信號處理模塊等部分組成。
主要關(guān)鍵技術(shù)如下:
• 環(huán)境模塊
在環(huán)境模塊中主要考慮了地形因素、風(fēng)場因素、大氣狀態(tài)因素與重力加速度因素。其中地形環(huán)境可根據(jù)用戶需要自行設(shè)置,風(fēng)場部分通過simulink的自帶風(fēng)切變模塊、紊流模塊與離散突風(fēng)模塊構(gòu)造了較為一般化的自然風(fēng)。
• 操縱桿信號處理模塊
無人機(jī)飛行仿真系統(tǒng)模型支持操縱桿控制,可接收操縱桿發(fā)送的油門指令、無人機(jī)姿態(tài)調(diào)節(jié)指令和升降指令,并利用接收到的指令數(shù)據(jù)進(jìn)行模型解算,實(shí)現(xiàn)對無人機(jī)姿態(tài)和飛行高度的控制,方便用戶模擬對無人機(jī)的駕駛。
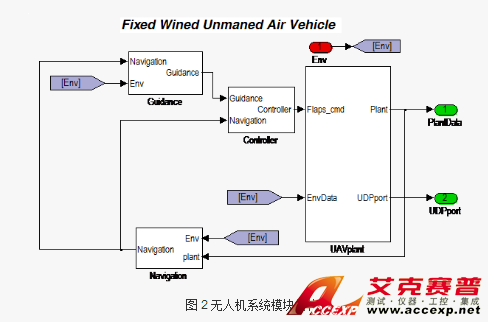
• 無人機(jī)系統(tǒng)模塊
無人機(jī)系統(tǒng)模塊如下圖所示,該模塊包含了無人機(jī)本體動力學(xué)模型、導(dǎo)航、發(fā)動機(jī)以及控制等所有功能模塊。首先,制導(dǎo)模塊向控制模塊給出當(dāng)前飛行階段的軌跡姿態(tài)指令信號,這些信號在控制模塊中通過針對無人機(jī)模型設(shè)計(jì)的控制律解算出完成飛行任務(wù)各個(gè)舵面所需的偏轉(zhuǎn)量與發(fā)動機(jī)推力所需的調(diào)整量,并將這些操控?cái)?shù)據(jù)傳遞給無人機(jī)動力學(xué)模型。無人機(jī)動力學(xué)模型根據(jù)當(dāng)前的運(yùn)動狀態(tài)與操縱數(shù)據(jù),計(jì)算作用在無人機(jī)上的所有外力、力矩,這些計(jì)算還依賴于模型初始化時(shí)定義的無人機(jī)各項(xiàng)氣動導(dǎo)數(shù)數(shù)據(jù),這些數(shù)據(jù)可在模塊初屬性中更改。得到了合外力與力矩后,根據(jù)六自由度動力學(xué)模塊就可解算出無人機(jī)新的運(yùn)動狀態(tài)數(shù)據(jù),這些數(shù)據(jù)會繼續(xù)迭代到氣動力與環(huán)境參數(shù)計(jì)算模塊中繼續(xù)解算無人機(jī)模型后續(xù)的運(yùn)動狀態(tài),如此循環(huán)迭代求解一段時(shí)間之內(nèi)無人機(jī)的各項(xiàng)飛行參數(shù)。
參數(shù)設(shè)置界面
參數(shù)設(shè)置界面
無人機(jī)仿真系統(tǒng)的運(yùn)行需要詳細(xì)的無人機(jī)數(shù)據(jù)的支持,這些數(shù)據(jù)中有一部分與無人機(jī)本體特性有關(guān),不需要經(jīng)常改動(如氣動導(dǎo)數(shù)),而有一部分參數(shù)可能經(jīng)常隨飛行階段或飛機(jī)狀態(tài)的改變發(fā)生變化(如重量、慣矩等)。仿真系統(tǒng)在設(shè)計(jì)過程中將不需經(jīng)常改動的數(shù)據(jù)定義在模型初始化的與處理程序中供模型調(diào)用,將可能經(jīng)常變動的參數(shù)通過一個(gè)單獨(dú)設(shè)計(jì)的參數(shù)設(shè)置界面進(jìn)行定義。每次運(yùn)行模型之前,用戶可在該界面中對無人機(jī)的各項(xiàng)參數(shù)進(jìn)行快速修改。
在參數(shù)配置界面中,用戶可針對仿真與環(huán)境、幾何參數(shù)、初始運(yùn)動狀態(tài)、執(zhí)行機(jī)構(gòu)特性和航跡參數(shù)設(shè)置五部分參數(shù)進(jìn)行快速設(shè)置。界面中默認(rèn)填充無人機(jī)原始的各項(xiàng)數(shù)據(jù),用戶可點(diǎn)擊“清空”將該部分已填充項(xiàng)清空,點(diǎn)擊“默認(rèn)”可將原始默認(rèn)值重新填充到各項(xiàng)目中。
• 多種試驗(yàn)構(gòu)型
在閉環(huán)系統(tǒng)中,導(dǎo)航系統(tǒng)、飛行控制系統(tǒng)、發(fā)動機(jī)控制系統(tǒng)等各分系統(tǒng)既可以是全數(shù)字的仿真模式,用于前期算法研究和確認(rèn);也可以任意替換實(shí)物產(chǎn)品,構(gòu)成實(shí)時(shí)仿真模式,用于實(shí)物產(chǎn)品的試驗(yàn)驗(yàn)證。
主要優(yōu)勢
Accexp可獨(dú)立完成無人機(jī)仿真模型的總體設(shè)計(jì)、研發(fā)、調(diào)試和項(xiàng)目交付等工作。并擁有獨(dú)特的優(yōu)勢:
• 專業(yè)的無人機(jī)仿真建模技術(shù);
• 專業(yè)的無人機(jī)仿真系統(tǒng)設(shè)計(jì)實(shí)施能力;
• 豐富的工程實(shí)踐經(jīng)驗(yàn)與半實(shí)物仿真經(jīng)驗(yàn);
• 齊全的專業(yè)隊(duì)伍,分工協(xié)作(包括導(dǎo)航系統(tǒng)建模團(tuán)隊(duì)、飛行控制系統(tǒng)團(tuán)隊(duì)、發(fā)動機(jī)控制系統(tǒng)團(tuán)隊(duì)、半實(shí)物仿真系統(tǒng)團(tuán)隊(duì)等);
• 完善的管理體系支撐。
客戶收益
采用Accexp的無人機(jī)飛行仿真技術(shù),客戶可以獲得以下收益:
• 快速完成無人機(jī)系統(tǒng)方案的可行性論證,大大提升其靈活性與經(jīng)濟(jì)性;
• 可驗(yàn)證飛行任務(wù)的可行性;
• 快速驗(yàn)證無人機(jī)系統(tǒng)設(shè)計(jì)結(jié)果;
• 提高飛機(jī)系統(tǒng)試驗(yàn)、調(diào)試和訓(xùn)練過程中的安全性;
• 縮短無人機(jī)飛行仿真系統(tǒng)開發(fā)周期,降低研制費(fèi)用;
• 為研發(fā)任務(wù)提供巨大便利,進(jìn)一步提升了系統(tǒng)更新迭代速度,可適應(yīng)市場需求環(huán)境的快速變化。




最新資訊